3D TERRESTRIAL LASER SCANNING AND LIDAR SERVICES IN AFRICA
3D laser scanning is the process of analyzing a real-world object or environment to collect data on its shape and possibly its appearance using a 3D Terrestrial Laser Scanner. The collected data can then be used to construct digital 3D models. The 3D terrestrial laser scanning and aerial lidar/drone technology has progressed hugely in the last few years, the simple-to-use, highly accurate 3D laser scanning and aerial mapping solutions complete scans of a wide variety of environments with exceptional speed, rendering detail with centimeter precision. There are many applications of 3D terrestrial laser scanning including photogrammetry, terrain acquisition, modeling or any photorealistic scans of buildings, structures, open spaces, and other natural or engineered environments among others. Laser scanning covers a number of techniques: (i) Close Range: Sub ‘mm’ small objects or highly detailed surfaces observed from less than 0.5m away; (ii) Terrestrial: Ranges from 20m to 2km depending on the equipment, accuracy from 3mm to 100mm; (iii) Airborne: Usually helicopter-based or drone-based covering large areas to a lesser accuracy.
At Orbital Africa, we offer cutting-edge 3D Terrestrial Laser Scanning and aerial LiDAR mapping services in Kenya and Africa region at large. Our reliable and unmatched services as well as solutions provide our clients with the best compromise between speed and quality whilst ensuring that quality control and quality assurance (QC/QA) measures are enforced in every stage of project execution from inception up to project closure. During detailed topographical surveys, additional information may often be integrated into topo surveys which helps a design team in taking account of the necessary and relevant site constraints such as accuracy, nature of terrain etc. This can also include site sections through particularly diverse gradient transects, spot heights of surrounding land and site features, i.e. neighbouring properties to assess overlooking, underground utilities information (from radar tracing and integrating utility records data).
3D Laser Scanning is essentially the swift capture of three-dimensional (3D) information reflected from an object or surface to a light sensor. Once the point cloud data is processed, traditional deliverables; 2D plans, elevations, and sections can be readily extracted, or used for fly-throughs and contextual purposes. After the scans are registered, a three dimensional database is established that can be used throughout the building’s lifecycle, or to aid in reconstruction should damage occur in the future. Additionally, remarkably sharp and descriptive photographic data is fused with the point cloud and can be easily viewed as dynamic panoramas. These images are dimensionable and can be annotated in most cases.
Workflow for 3D Terrestrial Laser Scanning
- Identifying the scanning scope area;
- Capturing a series of scans;
- Merging or the captured scans;
- Aligning the scans with the control coordinates/points;
- Producing a 3D CAD model or other desired deliverables.
Procedure for 3D Terrestrial Laser Scanning
At the most basic level, laser scanning involves a combination of controlled steering of laser beams and distance measurements. A rotary encoder controls the scanning motion by adjusting multiple scanning mirrors to guide the beams. Positioning the laser beam in two dimensions requires either rotating a single mirror along two axes or, for faster scanning, reflecting the beam onto two closely spaced mirrors mounted on orthogonal axes. The lasers can also be positioned in three dimensions via a servo-controlled lens system known as a focus- or Z-shifter. Single scans are generally not sufficient to produce a complete model of the subject and so multiple scans must be brought together into a common reference system through a process known as alignment or registration.
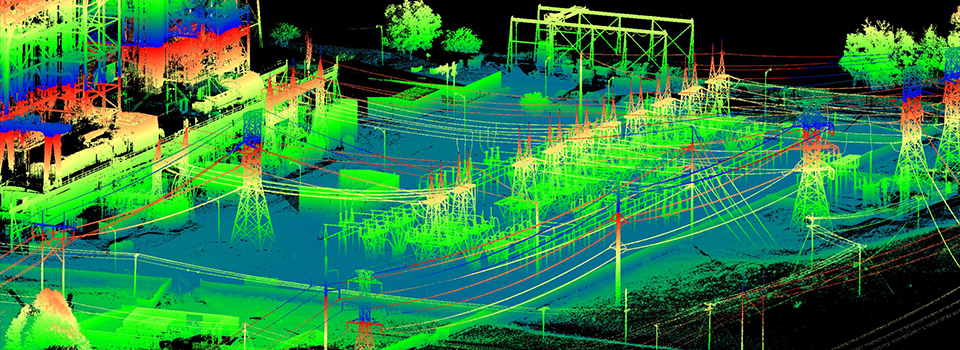
Point Clouds and Registration: A point cloud refers to a set of data points in a coordinate system. In the standard Cartesian coordinate system, points are defined in terms of X, Y and Z coordinates. In the context of 3D scanning, point clouds represent the results of a scan as unstructured three-dimensional data. The typical file formats of point clouds are TXT, IGS and ASCII. Point cloud data is then brought into a common reference system where the data is merged into a complete model via the process of alignment or registration. This process can occur during the scan itself (in the case of high-end 3D scanners) or as a post-processing step. The resulting data can be processed further using software to clean up aberrations or fill in gaps in the data points, creating a triangle mesh or polygonal model and exported as an STL (Stereolithography or Standard Tessellation Language) file or converted to a Non-Uniform Rational B-Spline (NURBS) for use in a CAD model. Typical formats for a triangle mesh are STL, OBJ and SAT.
Benefits of 3D Laser Scanning
- Avoiding potential site revisits for missed data (office base field checking);
- Fast turnaround where access time is restricted (e.g. railway possessions, contaminated areas, live motorways, etc.);
- High accuracy plans for retro-fitting design work, avoiding on-site alterations and clashes;
- The ability to amend the scope of projects without requiring a return to site;
- Avoiding the need for access platforms as the survey is entirely reflectorless;
- An archive record of the site at a snapshot in time which can always be accessed even though it may no longer exist in reality!
- Real time checking of the data (scan data can be viewed in real time in the field);
- Massive increase in data available compared to conventional surveys;
- Increased safety by using reflectorless survey techniques;
- Scan data can be used to validate other forms of survey quickly and efficiently;
- High quality images, animations and visualisations can be created for reports and presentations;
3D Terrestrial Laser Scanning Products and Deliverables
2D Products:
- Line work extracted as to a standard CAD DXF or DWG file.
- Topographical and roof plans.
- Building and structure elevations.
- Cross-sectional and longitudinal sections.
- Clearoute sections including contour maps etc. 3D Products:
- Rendered 3D models (AutoCAD, 3DStudio or Sketchup models);
- 3D wire frame line models (DXF/DWG);
- Animated visualisations (AVI or MP4);
- IMP, PTX, PTS, POD files (Pointools);
- BIM in Revit or IFC for import into other BIM as well as GIS systems.
You can also request a quote for 3D terrestrial laser scanning and LiDAR mapping services by sending us an e-mail at: [email protected] or by calling us on: +254-719-672296.